






Mathematical Formulation of Shells in 4D
Step 1: 3D Model
First, let’s see how a helicoidal shell is modeled.
A common model for a shell is a logarithmic helicoidal surface, defined by a parametrization such as:



Where:
u is the parameter that controls the logarithmic expansion (the shell’s growth),
v is the angular parameter (like the “turn” of the spiral),
a,b,c,d are constants controlling the shape (radius, expansion, height per turn, etc.).
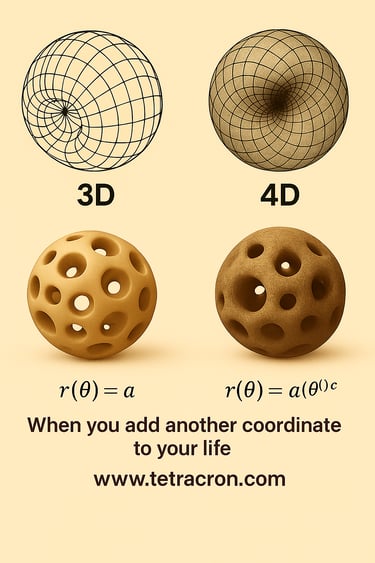
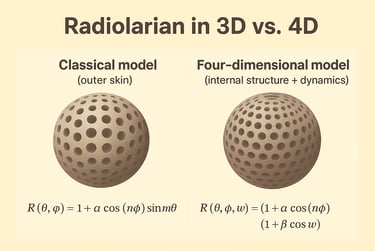
Step 2: Extension to 4 Dimensions
To move into 4D, we must add a fourth coordinate w(u,v).
This new coordinate can be:
Geometrically significant (e.g., a physical property),
An additional artificial dimension (like evolution over time), or one independent of u, v.
Option 1: Shell Rotating in the Fourth Dimension
(w,v) adds an oscillatory motion, as if the shell were “spinning” in the fourth dimension:




— time as the fourth dimension (animation)Here, w=t is always time, and the rest of the figure rotates as t increases:






Dimensión
Exploreing geometry of fourth dimension.
Math
space
avcesar58@hotmail.com
© 2025. All rights reserved.